Spoiler alert: in part 3, we finally succeed!
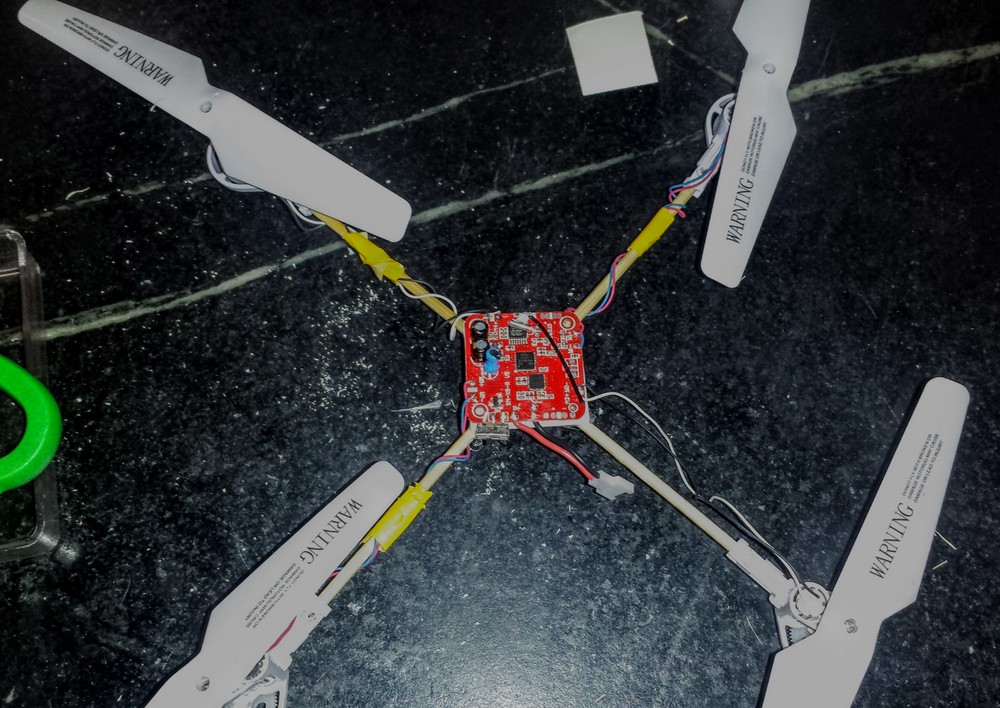
If you read the first post you know that I was inspired by all the cheap replacement parts for the Syma X5. Also the motor mounts have all sorts of interesting attachment points, including a tube that fits a 3mm (who knew they were a standard size?) bamboo barbeque skewer. I’ve seen people bodge together quadcopters with “real” controllers but with crappy wooden frames, so I thought why not.
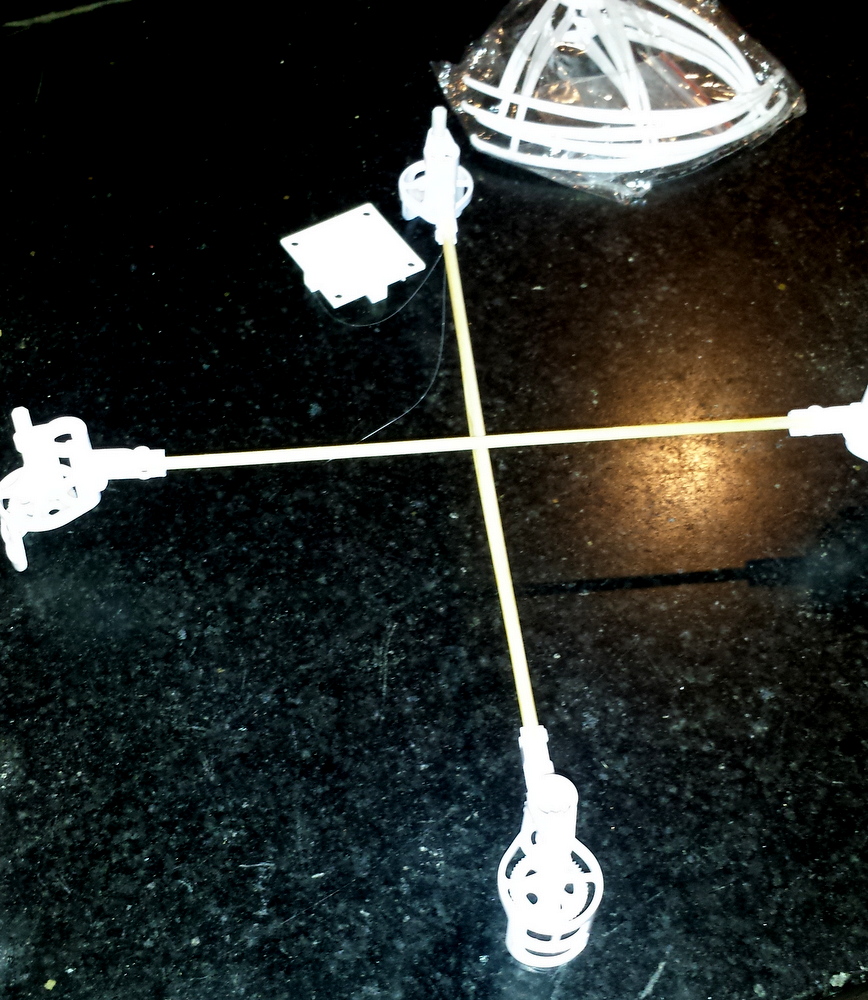
First I cut some skewers so the props were centered where they were in the original Syma X5. They were 9 inches center to center.
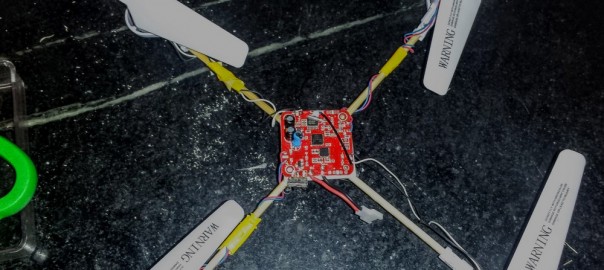
I taped it all together, with the controller in the middle. I didn’t have much hope, as you can see the fit on the motor mounts isn’t tight, and I was afraid they would twist. I taped them the best I could but as you can see in the video it was a total fail.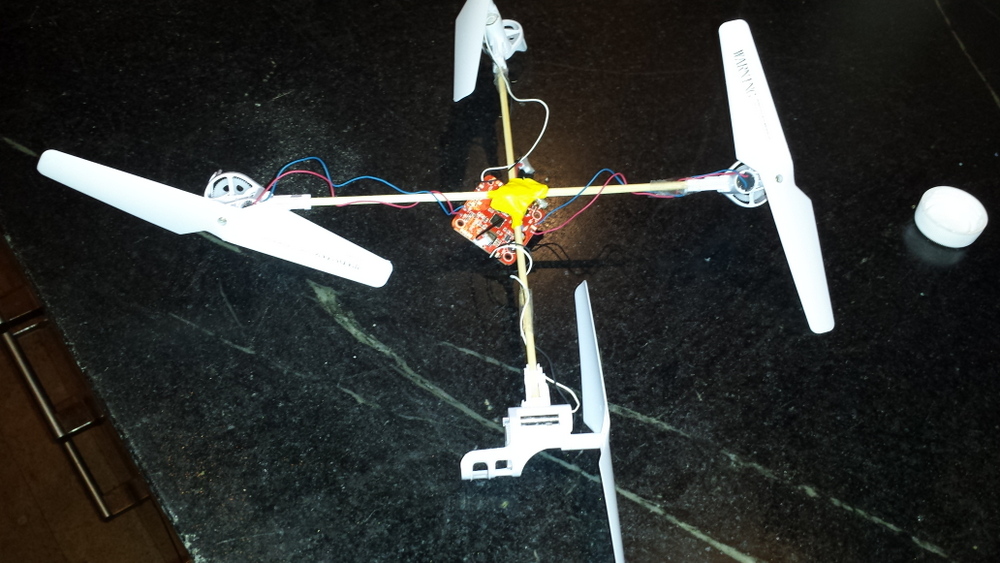
One problem I noticed, was that I had mounted the controller board upside down. Doh! The purpose of the controller is to keep it upright!
Next I designed a 3D printed hub for the middle, secured with hot glue. I found some tiny screws (scavanged from many tear aparts!) and drove those through holes in the arms and through the bamboo skewers. This time it worked better but spun. I concluded that the bamboo was twisting with the motor torque. Probably true, but later I also discovered that I had the motors mounted in the wrong place.
Conclusions: I need a sturdier frame, but still need to keep the weight light (how light, well, I find out in part 3…)