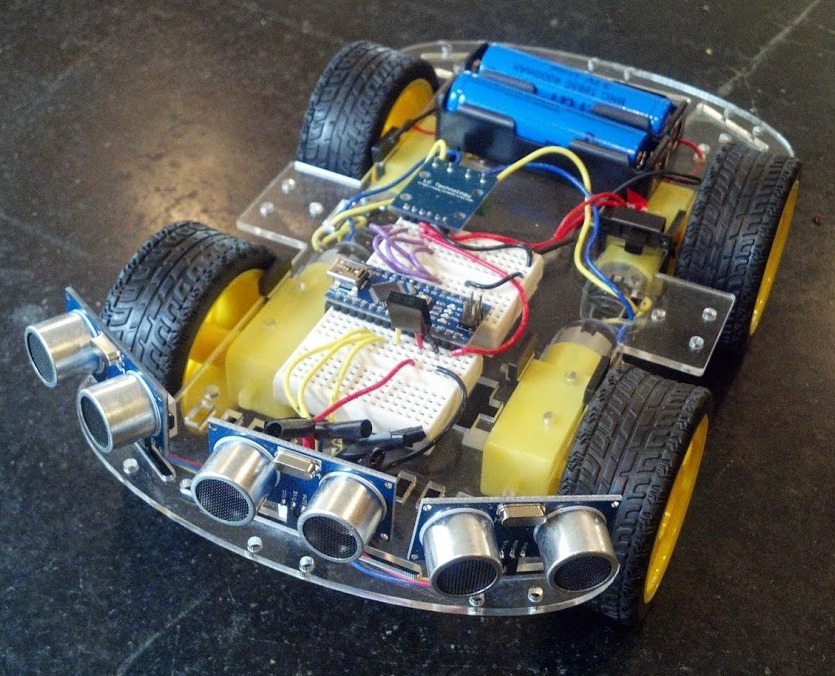
 Joe McDermot (leader of the Boston Robotics Meetup) discovered many members of the Boston Robotics Meetup had never scratch built a robot, so he sourced some cheap components from China and led a group build session. Joe did a fantastic job, keeping the price to $60, for a robot with 4 motors, Arduino clone controller, 3 ping sensors and IR control. (Joe’s a modest guy, but I call it Joebot)
Joe McDermot (leader of the Boston Robotics Meetup) discovered many members of the Boston Robotics Meetup had never scratch built a robot, so he sourced some cheap components from China and led a group build session. Joe did a fantastic job, keeping the price to $60, for a robot with 4 motors, Arduino clone controller, 3 ping sensors and IR control. (Joe’s a modest guy, but I call it Joebot)
After building it, a lot of the members had trouble with the programming, trouble I’ve seen when people attempt to do slightly more complex projects on the Arduino, after doing the basic Blink, and other examples.
In this series of posts, I will attempt to show how to coordinate several activities in an Arduino program. While the robot is an excellent challenge, the lessons here can be applied to any project where you have to “simultaneously” read sensors, control actuators, etc.
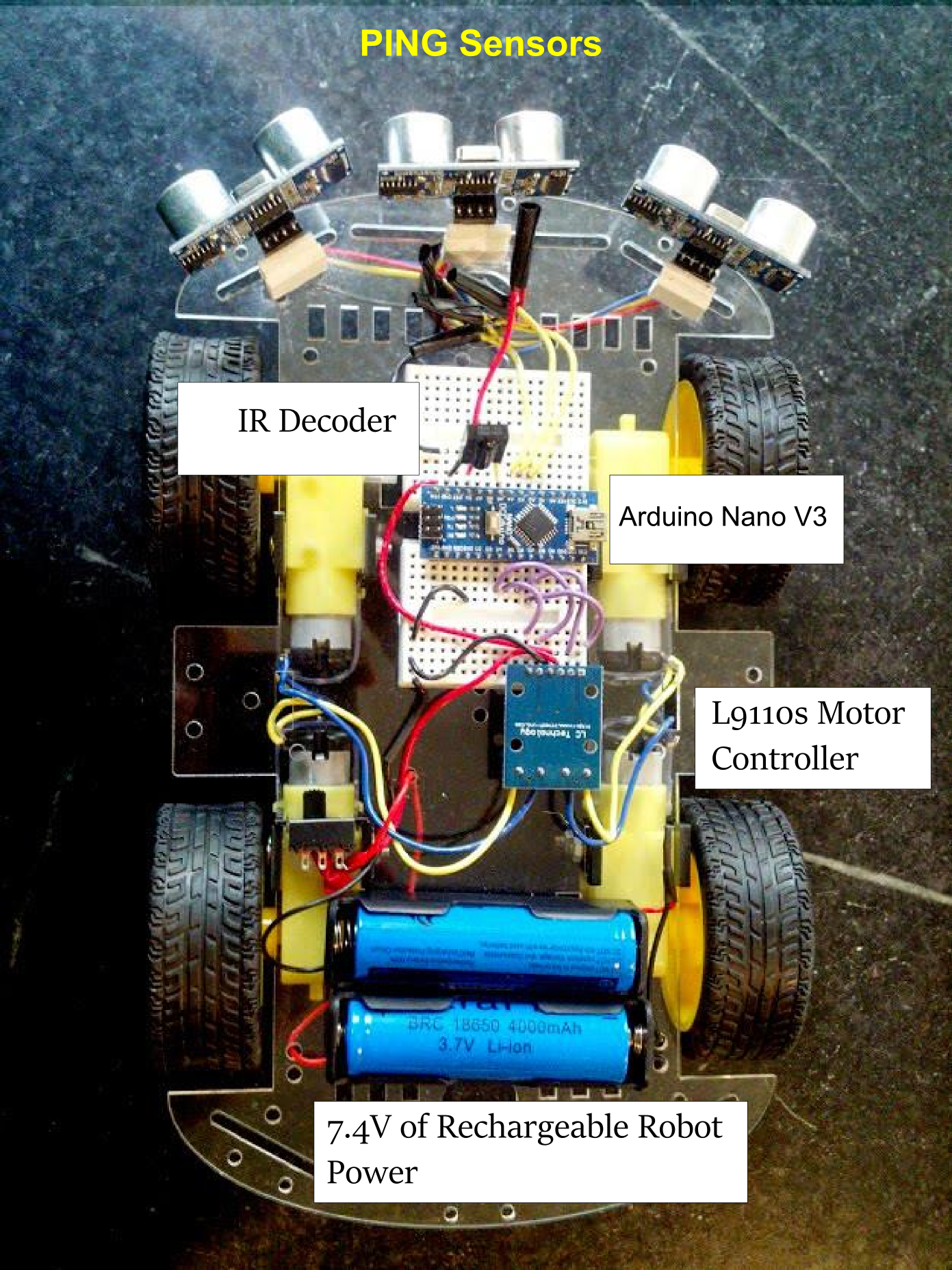
Bot-BOM:
- 4 DC gear motors with Wheels
- Acrylic base
- L9110s BLUE motor control board (2 channel, 2 wire control per motor)
- IR receiver
- 2 – Ping type distance sensors
- Arduino Nano V3 Clone
- Breadboards, wires, etc.
One note of caution here, many of the Nano clones used counterfeit FTDI chips, and were bricked by the new windows driver. DCCDuino, is actually not an out and out copy and uses a different USB-Serial chip, and works well.
 Next post we’ll work out how to handle motor control.
Next post we’ll work out how to handle motor control.